

小九直播篮球
小九直播篮球
阻抗控制在频域范围内的定义
时间: 2023-12-12 15:52:30 | 作者: 小九直播篮球
产品详情
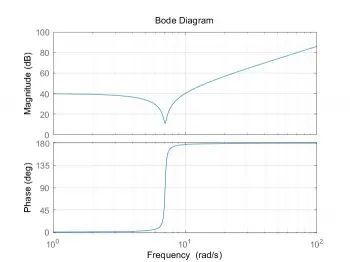
从分析结果中能够准确的看出,虚拟动态模型存在一个凹形状,这是由于系统动态的影响因素。

理解:硬件控制器之间的物理等价性。这在某种程度上预示着不仅受控系统的硬件组件可以影响物理系统的表面行为,而且控制器也可以影响。换句话说,控制器对受控物理系统的最终效果不单单是控制运动或力,而是修改其表观动态特性。
检测到外力并产生相应的执行器力来辅助机器人的运动,这使受控系统执行一个修正的行为。
阻抗的势与流:势(即力)输入和流量(即运动)输出,阻抗代表了从运动到力的因果关系。
阻抗控制与其他操控方法相比较,明显的优势:位置控制适用于自由运动,而不是受约束的运动。力控制需要接触力的反馈信息。因此,它不能在自由空间中工作。
混合位置/力控制将任务空间划分为两个子空间,称为位置控制和力控制子空间。在操作的流程中,必须依据相应的子空间来切换控制规律,这有几率会使响应的不稳定。相比之下,阻抗控制是一种统一的控制策略,适用于所有的操作阶段,包括自由运动、约束运动和瞬态阶段,而不需要切换控制模式。
用期望的阻抗来“掩盖”原始行为,即通过利用硬件的固有特性,可以在没有反馈的情况下调节末端的阻抗行为。
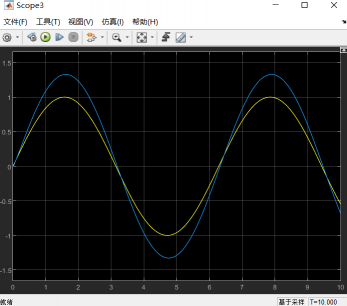
期望运动与实际运动:(由于阻抗呈现的刚柔因素,有必要进行控制参数的调节可实现期望的动态平衡)
稳定性问题、力跟踪方法、混合阻抗控制、鲁棒性方法、自适应算法、学习控制等。模型的不确定性和未知的环境是阻抗控制中不可避免的困难。
为了减少这样一些问题的负面影响,将一些先进的控制技术与阻抗控制相结合,包括鲁棒方法、自适应方法和学习方法。自适应阻抗操控方法可进一步分为两类。
其中一类是处理模型的不确定性。另一个目的是增强对未知环境的适应性。处理未知环境的方法通常被称为可变阻抗控制,因为阻抗模型的参数值是可变的,以适应变化的环境。应用神经网络技术,提高了控制器对模型不确定性的鲁棒性。
ADL5521datasheet发现典型电路做输入匹配时貌似并不能满足
最近在ADI官网中看见一篇文章《运算放大器驱动容性负载时的稳定性影响》,文中提到的第一点使放大器稳定的方法是
噪声增益和带宽,但对文中一点很疑惑:为什么将噪声极点(noise pole)
设计了一个电路,需要监测某个元器件的电压,现在该元器件的电压变化特别大,假如说是20V--40V,现在希望把电压维持
100Ω ±15%,其中 Rev.1.3a 里面规定相对放宽了一些,容忍
提供高效率 /
工作 /
提供可编程电压 /
保持高性能 /
,只要参数整定适当,加之系统的机械精度(运动轴、齿轮、电机丝杠传动化)
交流位置伺服系统中的应用 /
10%的误差,不少朋友就会有疑问,为什么是10%?理论上误差肯定是越小越好,所以为什么不能进一步的把常规
高频和低频之间的,使得信号的处理更容易,同时也方便了信号的处理和放大。 然而,接收机中频不能落入调谐
RISC-V完全学习手册(基于龙眼Longan开发板移植RT-Thread)4
- 12
- 中国线缆
行业20强
- 41
- 上海民营
企业100强
- 27
- 上海制造
业100强
- 90
- 上海企业
100强
